ROS2連携
"ROS"(Robot Operating System)は、Open Source Robotics Foundation, Inc. が提供する、ロボットアプリケーションの構築を容易にするオープンソースのソフトウェアライブラリ、ツール群です。
ACUAH では、Unity Technologies社のROSパッケージ、ROS-TCP-Connector, ROS-TCP-Endpoint を利用しています。
また、ROS2 のフレームワークとなります。
ACUAH の ROS2動作確認は、接続先ROS2ノードとして、Raspberry Pi 3 Model B+を利用し行っています。
1. ACUAH から ROS2ノードにメッセージを送信
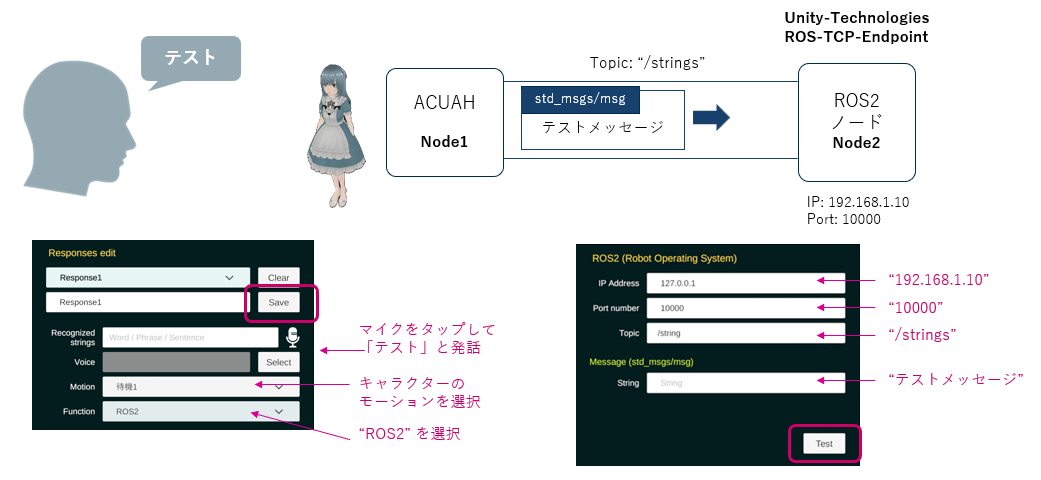
- この設定例では、ROS2ノード(ROS-TCP-Endpoint側)のIPアドレスが 192.168.1.10、ポート番号が 10000 となっています。
- ACUAHからROS2に対してメッセージを送る際のトピック名を編集します。デフォルトは "/strings" です。
- トピック名の先頭に"/"が入っていない場合には、自動的に"/"が付与されます。
- std_msgs/msg/String 形式の文字列が送信されます。
2. ROS2ノード から ACUAHにメッセージを送信
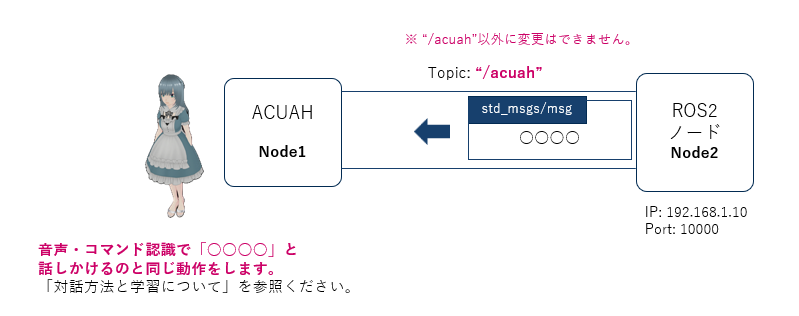
- ROS2ノードからACUAHに対してメッセージを送る際のトピック名は "/acuah" です。
- トピック名の変更はできませんのでご注意ください。
- std_msgs/msg/String 形式の文字列が送信されます。
ROS2連携を設定した場合には、キャラクター表示画面で、設定したIPアドレスからのROS2メッセージ受信が自動的に有効になります。(キャラクター表示画面起動時に、ROS2ノードとの通信ができている必要があります。)