設定画面3
画面
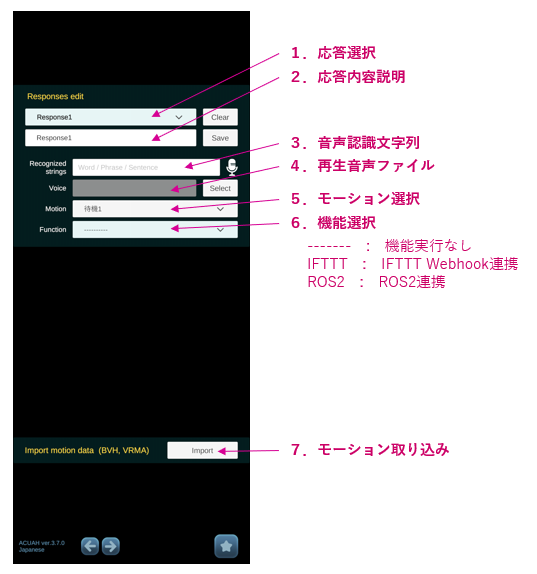
この画面では、キャラクターの応答をカスタマイズ(編集)することができます。
1. 応答選択
- 編集する応答を選択します。Response1~Response20 まで、20個の応答を作成できます。
2. 応答内容説明
- 作成した応答の説明(どういった動作をするのか)を入力します。(例:「テレビの電源をつける」などです。)
3. 音声認識文字列
- キャラクターが応答する音声(キャラクターに何と言って声をかけるか)を入力します。
- 右側のマイクアイコンを押して発話すると、認識した文字列が表示されます。
- また、このテキストは編集可能なので、音声認識がうまくいかない場合にはテキスト入力してください。
4. 再生音声ファイル
- キャラクターが応答する時の音声ファイルです。
- 右側の"select"ボタンから、スマートフォン上の音声ファイルを選択してください。
- wav, mp3, ogg に対応しています。
![]()
AirDrop で iPhone にファイルを送信した場合、iCloud Drive の ダウンロードフォルダに保存されています。 上記音声ファイル選択時に、iCloud Drive上のファイルを直接指定することは可能ですが、 /このiPhone内/ACUAH/MediaCache フォルダに自動でコピーされます。 また、/このiPhone内/ACUAH/MediaCache 以外の場所にある音楽ファイルを選択した場合も同様です。
iPhoneのストレージ容量が気になる場合には、音声ファイルを /このiPhone内/ACUAH/MediaCache フォルダ内に 保存するようにしてください。
5. モーション選択
- ドロップダウンリストで キャラクターのモーションを選択します。
- モーション取り込みを行った場合には、取り込みされたデータが選択できます。
6. 機能選択
-
キャラクターが応答する際に実行する機能を選択します。
-
各機能の設定項目詳細は、ページ後半をご覧ください。
7. モーション取り込み
- データフォーマットがBVH形式、またはVRMA(VRMAnimation)形式のモーションデータを取り込む事ができます。
- "Import"ボタンをタップすると、ファイル選択画面が表示されます。スマートフォンに保存されている BVH形式、VRMA形式のモーションデータを選択してください。

- BVH形式、VRMA形式 モーションデータかどうかフォーマットのチェックが行われ、問題がなければ以下のメッセージが表示されます。
- 取り込みされたモーションファイルは、5.モーション選択 で選択できます。
取り込んだモーションデータファイル名の先頭には “BVHE_”又は、"VRMAE_" の文字が自動で挿入されます。
■ 設定クリア・保存
-
Clear
- 編集中の応答設定の値を初期化します。
-
Save
- 編集中の応答設定を保存します。
- 設定を保存すると、2.応答内容説明 の文字列が 1.応答選択 に反映されます。
IFTTT
SwitchBot を利用した設定例は、主要機能補足説明>IFTTT Webhooks連携 を参照ください。
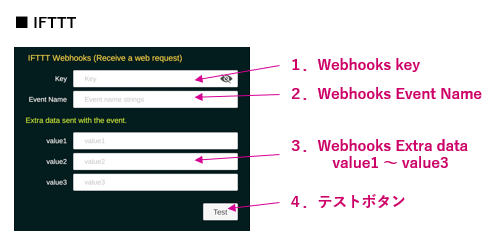
1. Webhooks key
- IFTTT ホームページ、Webhooks Documentation で確認された “Your key is: “ に続く文字列をコピー&ペーストで入力します。
- 右側の目のアイコンをタップすると、文字列のシークレ��ット表示切り替えができます。
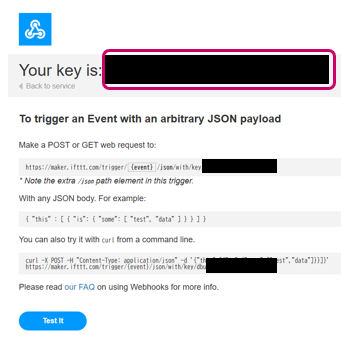
2. Webhooks Event Name
- IFTTT で設定した Event Name を入力します。
3. Webhooks Extra data value1~value3
- IFTTT で設定した Extra value1~value3 を設定します。(IFTTTで連携するサービス次第、必要な場合に設定します。)
4. テストボタン
- トリガーを発報して、正常に動作するか確認を行ってください。
ACUAHからIFTTT Webhooksに発報したトリガーは到達確認が行えません。IFTTT Webhooksの指定URLにトリガーが問題なく送信された場合には、成功メッセージ("Congraturations!~")が表示されますので、ご注意ください。
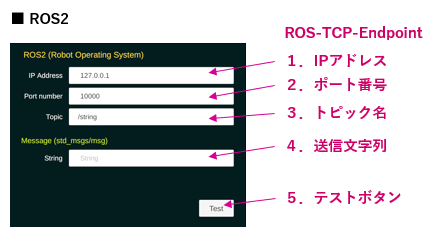
ROS2
ROS2の動作詳細は、主要機能補足説明>ROS2連携 を参照ください。
ACUAH と接続するROS2ノードは、Unity Technologies社 ROS-TCP-Endpoint をインストールした Raspberry Piで動作確認をしています。
1. IPアドレス
- ACUAH と通信する ROS2ノードのIPアドレスを入力します。IPv4アドレスのみ対応しています。
2. ポート番号
- ACUAH と通信する ROS2ノードのポート�番号を入力します。デフォルトは 10000 です。
IPアドレス、ポート番号は編集する応答毎に異なるものを設定できます。
また、ROS2連携を設定した応答がある場合には、キャラクター表示画面で、設定したIPアドレスからのROS2メッセージ受信が自動的に有効になります。 詳細は、主要機能補足説明>ROS2連携 を参照してください。
3. トピック名
- ACUAHからROS2に対してメッセージを送る際のトピック名を編集します。デフォルトは "/strings" です。
- 先頭に"/"が入っていない場合には、自動的に"/"が付与されます。
4. 送信文字列
- ACUAHからROS2に対して送信するメッセージ文字列を入力します。
- std_msgs/msg/String 形式です。
5. テストボタン
- 設定したROS2ノードとコネクションを確立し、メッセージの送信を行います。